Arbeitsblatt: Selbstfahrendes Auto programmieren
Material-Details
Robotik-Aufgabe für den Fachübergreifenden Unterricht in Informatik und Technischem Gestalten. Hardware unter pglu.ch
Informatik
Programmieren
6. Schuljahr
6 Seiten
Statistik
177616
1123
1
05.01.2018
Autor/in
Rolf Beck
Land: Schweiz
Registriert vor 2006
Textauszüge aus dem Inhalt:
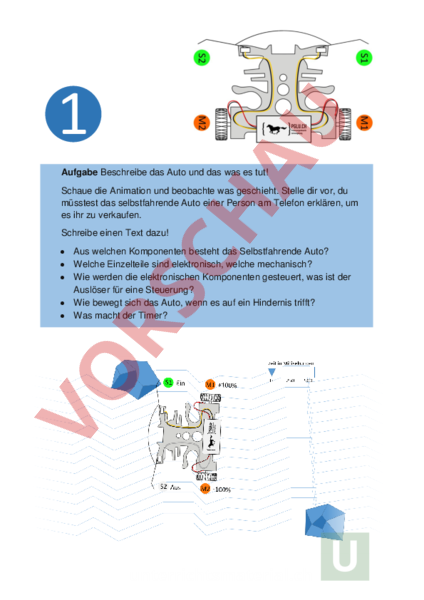
1 Aufgabe Beschreibe das Auto und das was es tut! Schaue die Animation und beobachte was geschieht. Stelle dir vor, du müsstest das selbstfahrende Auto einer Person am Telefon erklären, um es ihr zu verkaufen. Schreibe einen Text dazu! Aus welchen Komponenten besteht das Selbstfahrende Auto? Welche Einzelteile sind elektronisch, welche mechanisch? Wie werden die elektronischen Komponenten gesteuert, was ist der Auslöser für eine Steuerung? Wie bewegt sich das Auto, wenn es auf ein Hindernis trifft? Was macht der Timer? 2 Aufgabe Ein einzelner Motor vorwärts und bei Sensorberührung rückwärts. Beachte: der andere Motor läuft standardmässig rückwärts. Setze diese Blöcke richtig in den Hauptloop ein! Wenn Sensor 2 ein Hindernis berührt (S2Ein), dann lasse Motor 1 Rückwärts laufen (M1-100%) Wenn Sensor 2 nichts berührt (S2Aus), dann lasse Motor 1 vorwärts laufen (M1100%) 3 Aufgabe Ein einzelner Motor vorwärts und bei Sensorberührung eine halbe Sekunde rückwärts Wenn Sensor 2 ein Hindernis berührt (S2Ein), dann lasse Motor 1 rückwärts drehen (M1-100%). Tue dies während einer halben Sekunde, auch wenn die Berührung nur sehr kurz war! Wenn Sensor 2 nichts berührt (S2Aus), dann lasse Motor 1 vorwärts laufen (M1100%) Hole im Menu ein einfaches «wenn» und klicke auf den schwarzen Punkt um das «sonst» unten anzufügen. Nehme ab jetzt immer diesen «wenn-sonst»-Block. Er ist eleganter als die beiden «wenn»-Blöcke aus Aufgabe 2! 4 Erweiterungsaufgabe Ein einzelner Motor vorwärts und bei Sensorberührung eine halbe Sekunde Rückwärts, mit LED-Blinker Wenn Sensor 2 nichts berührt (S2Aus), soll M1 mit voller Geschwindigkeit vorwärts drehen (M1100%). Wenn Sensor 2 auf ein Hindernis trifft (S2Ein), soll M1 mit vollem Tempo während einer halben Sekunde rückwärts drehen (M1-100%). Während dies geschieht soll LED1 3x aufblinken. Hole im Menu ein einfaches «wenn» und klicke auf den schwarzen Punkt um das «sonst» unten anzufügen 5 Erweiterungsaufgabe Ein einzelner Motor vorwärts und bei Sensorberührung eine halbe Sekunde rückwärts ohne Programmpause Programmiere den Motor gleich wie in Aufgabe 3. vermeide aber den Block «pausiere 500ms». Dieser führt dazu, dass das Programm pausiert und in dieser Zeit keine Sensorberührungen registriert werden können! Tipp: Benenne eine Variable mit «Timer». Sie soll im Millisekundentakt von 0 bis unendlich hochzählen. Setze «Timer» durch jede Sensorberührung wieder auf 0! Lasse M1 rückwärts laufen, solange «Timer» kleiner als 500 ist. 6 Aufgabe Das Hauptprogramm «Selbstfahrendes Auto» Programmiere das Selbstfahrende Auto, so dass es sich gleich verhält, wie du es der Animation beobachtet hast! Verwende deine Erkenntnisse aus den Übungen 1-3. Füge noch blinkende LEDs aus Übung 4 ein! Falls du die Erweiterungsaufgabe 5 erfolgreich gelöst hast, kannst du die erweiterte Version mit zwei Variablen «Timer 1» und «Timer 2» ausprobieren. Die Lösung dazu findest du in Variante 3. Hole im Menu ein einfaches «wenn» und klicke auf den schwarzen Punkt um das «sonst» unten anzufügen