Arbeitsblatt: Einfachen Roboter bauen
Material-Details
Einfachen Roboter aus Holz bauen und programmieren. Ideal als Projekt mit oder ohne Programmieren im TTG ab der 5. Klasse. Die Anleitungen eignen für das selbständige Arbeiten der Klasse. da die Bilder als Atelier organisiert werden können.
Werken / Handarbeit
Anderes Thema
5. Schuljahr
15 Seiten
Statistik
197418
1499
17
01.04.2021
Autor/in
Rolf Beck
Land: Schweiz
Registriert vor 2006
Textauszüge aus dem Inhalt:
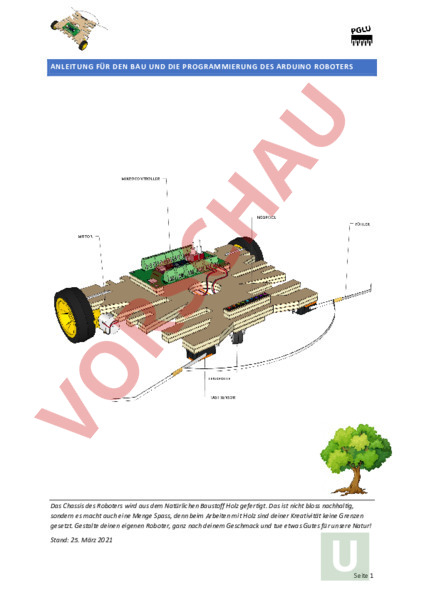
ANLEITUNG FÜR DEN BAU UND DIE PROGRAMMIERUNG DES ARDUINO ROBOTERS Das Chassis des Roboters wird aus dem Natürlichen Baustoff Holz gefertigt. Das ist nicht bloss nachhaltig, sondern es macht auch eine Menge Spass, denn beim Arbeiten mit Holz sind deiner Kreativität keine Grenzen gesetzt. Gestalte deinen eigenen Roboter, ganz nach deinem Geschmack und tue etwas Gutes für unsere Natur! Stand: 25. März 2021 Seite 1 INHALT Anleitung für den Bau und die Programmierung des Arduino Roboters 1 1. Materialliste 3 1.1. Version mit Holz-Chassis . 3 1.2. Version 3D-Druck 3 2. Bau des Chassis 4 2.1. Holz vorbereiten 4 2.2. Form skizzieren und Vorlage übertragen 5 3. Roboter zusammenbauen . 7 3.1. Chassis für Montage der Elektronik vorbereiten 7 3.2. Anschlussdrähte der Motoren verlängern und Lötstellen sichern 8 3.3. Räder einstecken . 9 3.4. Federstahlband für Fühler biegen . 10 3.5. Komponenten montieren . 11 4. Elektronik anschliessen . 12 4.1. Grundroboter verbinden . 12 4.2. Erweiterte Komponenten anschliessen 13 5. Arduino Roboter programmieren . 14 5.1. Grundlagen zum Programmieren von Arduino mit Code oder grafisch . 14 5.2. Grundroboter programmieren 15 5.3. Erweiterte Komponenten programmieren . 15 5.4. Weitere Anleitungen und Unterstützung 15 Seite 2 1. MATERIALLISTE 1.1. VERSION MIT HOLZ-CHASSIS Einkaufsliste • • • • • • • • • • Roboter Bausatz mit Mikrocontroller MOTOR oder KOMFORT Sperrholz Pappel 10mm 240mm 300mm Laufrichtung entlang kurze Seite Details zum Holz siehe Kapitel 2 12 Holzschrauben 3mm 16mm 4 Kabelbinder 3mm oder 3.6mm L250mm Malerklebband Heissleim Lötmaterial Schraubendreher Grösse 0 oder 1 Aale, Sackmesser oder Bohrer Optional • • • LEDs mit Vorwiderstand Neopixel Strip mit 30 oder 72 Pixeln Powerbank (anstatt der Batterien) 1.2. VERSION 3D-DRUCK Einkaufsliste • • • • • • • • • • • Roboter Bausatz mit Mikrocontroller MOTOR oder KOMFORT Modell für 3D-Druck Filament ca. 12m 12 Schrauben M3 25 12 Muttern M3 12 Unterlegscheiben 3.2mm 4 Kabelbinder 3mm oder 3.6mm L250mm Malerklebband Heissleim Lötmaterial Schraubendreher Grösse 0 oder 1 Optional • • • LEDs mit Vorwiderstand Neopixel Strip mit 30 oder 72 Pixeln Powerbank (anstatt der Batterien) Seite 3 2. BAU DES CHASSIS 2.1. HOLZ VORBEREITEN Angaben zum Plattenzuschnitt: • • • Sperrholz Pappel (leicht und weich) oder Birke (schwerer) Länge 240 mm Breite 300 mm Stärke/Dicke 10 mm Holzmaserung entlang der Länge (240 mm) Seite 4 2.2. FORM SKIZZIEREN UND VORLAGE ÜBERTRAGEN Seite 5 Seite 6 3. ROBOTER ZUSAMMENBAUEN 3.1. CHASSIS AUF MONTAGE DER ELEKTRONIK VORBEREITEN Seite 7 3.2. ANSCHLUSSDRÄHTE DER MOTOREN VERLÄNGERN UND LÖTSTELLEN SICHERN Die Anschlusslitzen von mindestens einem Motor müssen verlängert werden • • • • • Die bestehenden Lötstellen an den Motoren sind sehr brüchig. Sie können mit etwas Heissleim oder ähnlich versiegelt werden Die Litzen um ca. 10 cm verlängern Lötstellen mit Schrumpfschläuchen isolieren Schrumpfschläuche mit kleiner Flamme vorsichtig erwärmen und schrumpfen Tipp: Achte darauf, dass die Flamme möglichst zielgenau auf den Schrumpfschlauch trifft Seite 8 3.3. RÄDER EINSTECKEN Die Räder müssen von Hand auf die Achsen der Motoren aufgesteckt werden: • Die Räder vor der Montage der Motoren am Roboter aufstecken Die Druckkraft über die Achse auf eine feste Unterlage ableiten (Bild) Die Räder auf der Seite der Elektrischen Anschlüsse aufstecken Darauf achten, dass die Abflachungen der Achsen mit der Lage der Aufsteckbohrung am Rad übereinstimmen Siehe auch dieses Video: PRESSDRUCK • • • • Seite 9 3.4. FEDERSTAHLBAND FÜR FÜHLER BIEGEN Biegevorlage herunterladen, als A3 ausdrucken und Federband mit Zange biegen • Biegevorlage hier herunterladen Federband über eine Kante ziehen, bis es die richtige Rundung aufweist. Achtung, scharfkantig Handschuhe tragen! Das Federband soll so gebogen sein, dass die Winkel der Fühler mehr oder weniger spannungsfrei an die montierten Schalterhebel passen. Mit Klebband befestigen (siehe Bilder nachfolgende Seite) Seite 10 3.5. KOMPONENTEN MONTIEREN Seite 11 4. ELEKTRONIK ANSCHLIESSEN 4.1. GRUNDROBOTER VERBINDEN Hinweis: Detailliertes Anschlussschema hier herunterladen PGLU.CH BAU ARDUINO ROBOTER Tipp: Für Anleitung zum Löten Video schauen PGLU BAU LÖTEN LERNEN S2 S1 M2 M1 Hinweis zur richtigen Polung der Komponenten: • • • • Die Motoren müssen im unprogrammierten Zustand RÜCKWÄRTS laufen (LEDs bei den Motoren leuchten rot, nicht grün) Die Polung der Sensorverbindungen ist egal Die Drahtbrücke zwischen den beiden Pluspolen 3-5V nicht vergessen (*) Checkliste zur Fehlersuche hier herunterladen Seite 12 4.2. ERWEITERTE KOMPONENTEN ANSCHLIESSEN Die Anleitung zum Anschluss der erweiterten Komponenten befinden sich hier: • • • • • • Ultraschallsensor: WORKSHOP.PGLU.CH SENSOR ULTRASCHALLSENSOR Servo: WORKSHOP.PGLU.CH AKTOR SRVO Neopixel: WORKSHOP.PGLU.CH AKTOR NEOPIXEL Mikrofon: WORKSHOP.PGLU.CH SENDOR MIKROFON Fotowiderstand: WORKSHOP.PGLU.CH SENSOR FOTOWIDERSTAND Potentiometer: WORKSHOP.PGLU.CH SENSOR POTENTIOMETER • Hinweis: Anschlussschema Komplett hier herunterladen Seite 13 5. ARDUINO ROBOTER PROGRAMMIEREN 5.1. GRUNDLAGEN ZUM PROGRAMMIEREN VON ARDUINO MIT CODE ODER GRAFISCH Alle Komponenten und Funktionen des Roboter Starter Kits können entweder mit der grafischen PGLUSprache (ähnlich wie Scratch, Calliope und MicroBit) oder dem originalen C Code der Arduino IDE programmiert werden: • • • • Link: Was ist eine grafische Programmierung? Link: Unterschiedliche Arten zur Programmierung eines Arduinos Link: Übersetzung der grafischen Programmblöcke in C Anleitung: Übertragung von Programmen auf den Mikrocontroller ohne Teacher Box Bild: Grafisches Grundprogramm für den Roboter unter mach.pglu.ch Seite 14 5.2. GRUNDROBOTER PROGRAMMIEREN Die Anleitung zum Programmieren der des Grundroboters befindet sich hier: • Arduino Roboter programmieren: PGLU.CH CODING ARDUINO ROBOTER 5.3. ERWEITERTE KOMPONENTEN PROGRAMMIEREN Die Anleitung zum Programmieren der erweiterten Komponenten befinden sich hier: • • • • • • Ultraschallsensor: WORKSHOP.PGLU.CH SENSOR ULTRASCHALLSENSOR Servo: WORKSHOP.PGLU.CH AKTOR SRVO Neopixel: PGLU.CH CODING NEOPIXEL Mikrofon: WORKSHOP.PGLU.CH SENDOR MIKROFON Fotowiderstand: WORKSHOP.PGLU.CH SENSOR FOTOWIDERSTAND Potentiometer: WORKSHOP.PGLU.CH SENSOR POTENTIOMETER 5.4. WEITERE ANLEITUNGEN UND UNTERSTÜTZUNG • PGLU.CH ANLEITUNG Seite 15